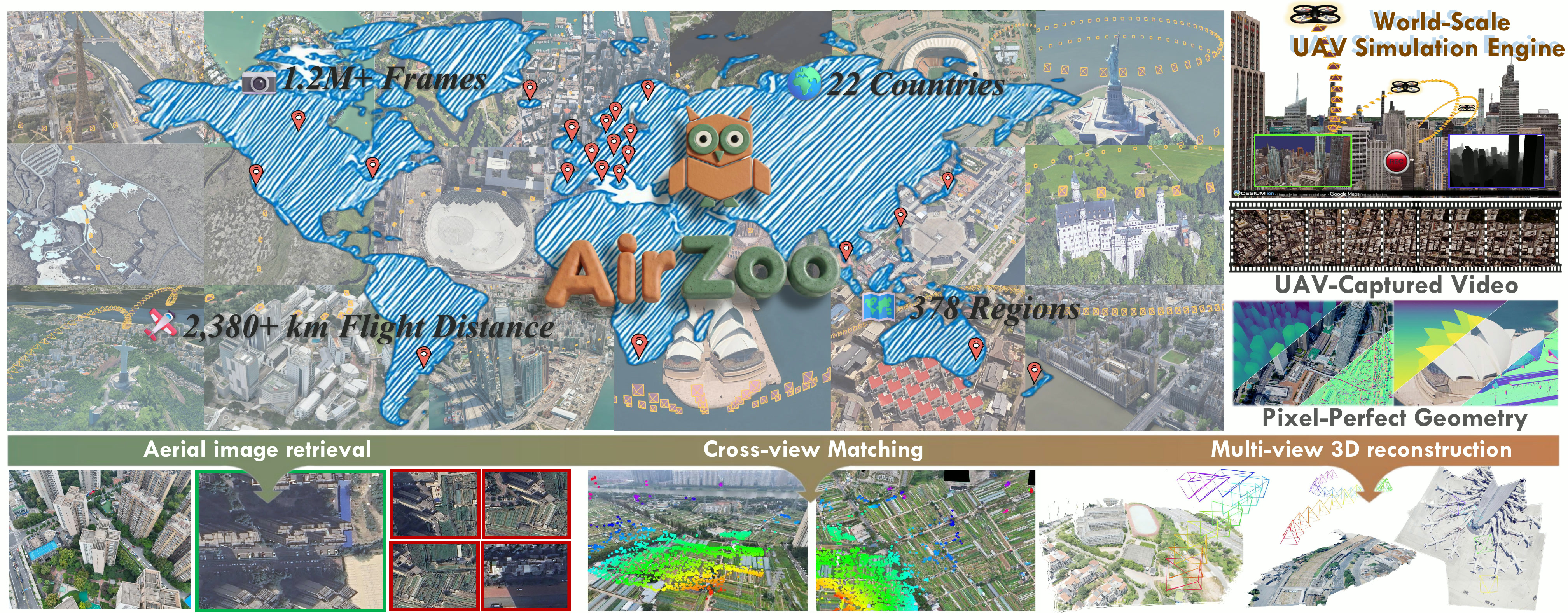
 AirZoo
: A Unified Large-Scale Dataset for
AirZoo
: A Unified Large-Scale Dataset for
Grounding Aerial Geometric 3D Vision
ECCV 2026
1National University of Defense Technology, Changsha, China
2Singapore University of Technology and Design, Singapore
3National Key Laboratory of Advanced Guidance and Control Technology
*Equal contribution †Corresponding author